Các dạng đo lực trong cảm biến lực
A. Khái niệm:
Lực là một đại lượng vecto, đặc trưng cho tác dụng tương hỗ giữa các vật thể, làm cho các vật thể biến dạng hay vận động.

Khối lượng là số lượng vật chất và người ta có thể định nghĩa lực là lực hấp dẫn giữa các khối lượng.
Trọng lượng của một vật là lực hút trái đất tác dụng lên vật đó.
Bảng 1.1: Bội và ước của đơn vị Newton
| TT | Tên gọi | Ký hiệu | Hệ số nhân với trị số đơn vị |
| 1 | Exa Newton | EN | 1018 |
| 2 | Peta Newton | PN | 1015 |
| 3 | Tera Newton | TN | 1012 |
| 4 | Giga Newton | GN | 109 |
| 5 | Mega Newton | MN | 106 |
| 6 | Kilo Newton | KN | 103 |
| 7 | Hecto Newton | hN | 102 |
| 8 | Deca Newton | daN | 101 |
| 9 | Newton | N | 100 |
| 10 | Deci Newton | dN | 10-1 |
| 11 | Centi Newton | cN | 10-2 |
| 12 | Mili Newton | mN | 10-3 |
| 13 | Micro Newton | µN | 10-6 |
| 14 | Nano Newton | nN | 10-9 |
B. Đơn vị:
Lực – Theo định luật II Newton:
| F = k.m.a | Trong đó:
F – Lực (N) tác dụng vào vật có khối lượng m (kg)
a – Gia tốc (m/s2)
k – Hệ số phụ thuộc vào đơn vị dùng
|
Trọng Lực – Công thức:
| P = k.m.g | Trong đó:
m – Khối lượng của vật đó (kg)
a – Gia tốc trọng trường nơi đặt vật (m/s2)
k – Hệ số tỷ lệ phụ thuộc vào đơn vị dùng
|
Chuyển đổi giữa các đơn vị đo lực:
Nguyên tắc chung: một đại lượng có số đo A1 khi dùng đơn vị đo a1. Vấn đề đặt ra là tỷ số đo A2 khi dùng đơn vị đo a2khác a1. Số đó tỉ lệ nghịch với cỡ của đơn vị đo, ta có:

Bảng 1.2: Đơn vị các nước đang dùng
| Nước sử dụng | Tên gọi | Ký hiệu |
| Đức | Kilopond | Kp |
| Pond | p | |
| Megapond | Mp | |
| Nga | Kilogam lực | kГc |
| Gam lực | Гc | |
| Tấn lực | Tc | |
| Trung Quốc | Kilogam lực | kG |
| Gam lực | G | |
| Tấn lực | T | |
| Anh, Mỹ | Kilogam lực | kgf |
| Gam lực | gf | |
| Tấn lực | tonf | |
| Pound lực | Lp.f |
Bảng 1.3: Quy đổi giữa các đơn vị đo lực
| Kilogam lực | Kilopond | Pound lực | Newton | |
| Kilogam lực | 1 | 1 | 2,2046203 | 9.80665 |
| Kilopond | 1 | 1 | 2,2046203 | 9.80665 |
| Pound lực | 0.453592 | 0.453592 | 1 | 4.44844 |
| Newton | 0.10197 | 0.10197 | 0.22481 | 1 |
C. Phân loại dụng cụ:
C1. Theo chức năng sử dụng
| Lực kế đo lực nén | Lực kế đo lực kéo | Lực kế đo lực nén và kéo |
 |  |  |
C2. Theo nguyên lý đo
Lực kế cơ học

Lực kế quang học

Lực kế thủy lực

Lực kế điện tử

C3. Theo cấp chính xác:
Các dụng cụ đo được quy định theo cấp chính xác.
Ví dụ: tại Đức người ta dùng cấp chính xác: 0,01 ; 0,02 ; 0,05 ; 0,1 ; 0,2 ; 0,5 và 1.
D. Các dụng cụ đo thông dụng:
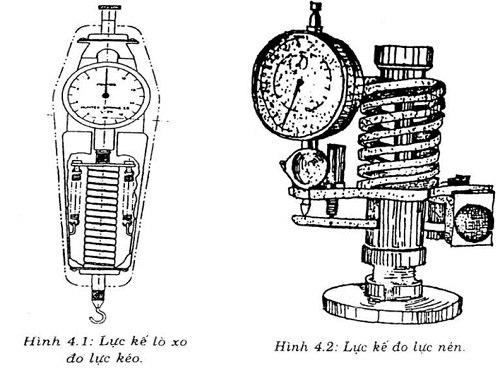
Lực kế cơ
Định nghĩa: là những lực kế có bộ phận chỉ thị độ biến dạng làm việc theo nguyên lý cơ học.
Ưu điểm: cấu tạo đơn giản, dễ thao tác, ổn định theo thời gian.
Lực kế đồng hồ lò xo
Phần tử đàn hồi: Nhìu hình dạng khác nhau: lò xo xoắn, hình tròn, hình ô van, hình nửa tròn…
Đồng hồ hiển thị :
Gồm nhiều loại, biểu thị trực tiếp hay thông qua cơ cấu chuyển đổi phóng đại cơ học, các yếu tố quyết định chất lượng:
Chất lượng của phần tử đàn hồi.
Khả năng làm việc của đồng hồ hiển thị.
Sự ổn định của các chi tiết, đảm bảo ổn định tỷ số truyền độ biến dạng của phần tử đàn hồi lên đồng hồ hiển thị.

Khi trọng lượng lớn, dùng loại cân như trên không phù hợp, ta dùng loại cân nhiều đòn.

Lực kế quang học
Là những lực kế mà biến dạng của phần tử đàn hồi được đo bằng thiết bị quang học, loại này khắc phục được nhược điểm của các cơ cấu cơ học như sai lệch tỷ số truyền, ma sát khớp quay, sai số của bộ chỉ thị .
Lực kế thủy lực – khí nén

Cảm biến lực điện tử (cân điện tử)
Cảm biến lực điện tử là những lực kế mà sự thay đổi của lực hay sự biến dạng hoặc dịch chuyển sinh ra bởi lực tác dụng được chuyển thành tín hiệu điện
Cảm biến lực điện trở (load cell)
Gồm nhiều dạng: dạng thanh, dầm, vòng, trượt,…
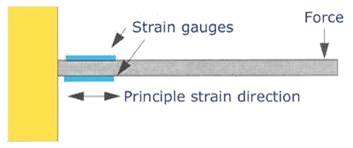
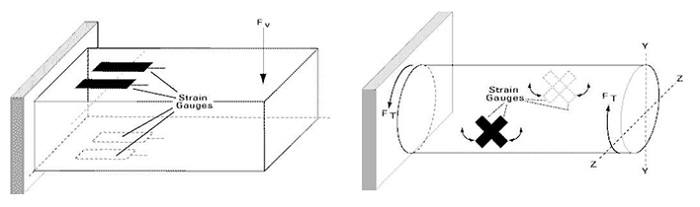
Cảm biến lực điện trở dạng thanh
Cấu tạo khá đơn giản: gồm có 4 cảm biến điện trở (strain gauge) được dán vào phần tử đàn hồi theo hai hướng trục (2 cảm biến) và vuông góc với trục (2 cảm biến) và 4 cảm biến này được nối với nhau theo mạch cầu wheatstone.

|  |
| Điện thế ra: |  |
| Lực tác dụng: |  |
| Từ phương trình trên thì P tỉ lệ tuyến tính với điện thế ra Eo theo hằng số tỉ lệ C |
 |
| Độ nhạy của dụng cụ: |  |
Lực lớn nhất có thể đo được: Pmax = Sf.A
Sf là độ bền mỏi
Cả Pmax và độ nhạy S đều phụ thuộc vào diện tích mặt cắt ngang A, cụ thể là nếu A giảm thì độ nhạy S tăng và Pmax giảm.
Tỉ số điện thế ra E0 và vào Ei của mạch cầu khi chịu lực Pmax
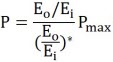
Hầu hết các loại loadcell dạng trụ đều làm từ thép AISI 4340 và có

Trên thực tế thì hầu hết các loại loadcell đều có Eo/Ei = 3mV/V trên toàn bộ thang đo với lực P=Pmax , lực P được xác định:

Cảm biến lực điện trở dạng dầm
Cấu tạo:
Gồm có 4 cảm biến, 2 được dán ở mặt trên và hai dán ở mặt dưới của dầm, tất cả đều dán theo trục của dầm và theo mạch cầu wheatstone.
|  |
 |
 |
Nguyên lý hoạt động: khi chịu tác dụng của lực P thì sẽ có moment M=P.x
Ta có các biến dạng:

| Điện thế ra E0 từ mạch cầu: |  |
| Lực P được xác định: |  |
| Hằng số tỷ lệ: |  |
| Độ nhạy của dụng cụ: | 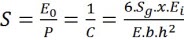 |
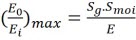
| Lực lớn nhất có thể đo được: | 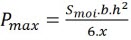 |
Độ nhạy sẽ lớn nhất và phạm vi đo nhỏ nhất khi x tiến tới bằng chiều dài của dầm, ta có tỉ số điện thế khi P đạt giá trị max
Hầu hết các loại loadcell dạng trụ đều làm từ thép AISI 4340 và có:

Tỉ số (Eo/Ei) có thể lấy từ 4÷5 mV/V, độ nhạy của dầm lớn hơn độ nhạy dạng thanh là 5%.
Cảm biến lực điện trở dạng vòng
Cấu tạo:
Gồm 4 biến trở được gắn lên vòng đàn hồi, hai biến trở ở mặt trong và 2 biến trở ở mặt ngoài, và chúng được nối với nhau theo mạch cầu wheatstone.
|  |

Loại này có phạm vi đo thay đổi lớn, bằng cách thay đổi đường kính D hay chiều dày t hay chiều rộng w. Nguyên lí hoạt động cũng dựa vào sự biến dạng của các biến trở, dẫn đến tín hiệu ra có quan hệ tuyến tính với lực cần đo.
Cảm biến lực điện trở dạng trượt
| Loại này có kích thước nhỏ dùng ở những nơi có không gian bị hạn chế (có thể gọi là cân lực dạng phẳng), và trong điều kiện rung động, được đặt trong lỗ nhỏ trong bề mặt trung gian của mặt bích và dùng như một cảm biến. |  |
Chống nhiễu (sai số) cho cảm biến lực điện trở
Nhiệt độ:
+ Là yếu tố chủ yếu gây nên sai số cho phép đo củalực kế điện trở, vì nó làm thay đổi môđun đàn hồi của vạt liệu và thay đổi kích thước, và tất nhiên sự thay đổi do môđun đàn hồi lớn hơn khoảng 2.5%, và 0.15% là do thay đổi kích thước khi nhiệt độ thay đổi 100 oF.
Và để bù trừ (hay chống sai số do nhiệt độ) thì người ta mắc thêm điện trở Rs. Tính toán cho:

Mà Rs=ρ.L/A , Nên suy ra

b- là hệ số nhiệt độ của điện trở suất
c- hệ số môđun đàn hồi
Cảm biến lực điện cảm
Là những cảm biến đo lực trên nguyên tắc thay đổi điện cảm.
Thành phần cấu tạo chính của loại này là cuộn dây tự cảm.
Điện cảm của cuộn dây:
L= µ.µo. ω2.S/l
Trong đó:
µo , S, l không thay đổi.
Vậy µ và ω là dễ dàng thay đổi.
| Thông thường người ta thay đổi điện cảm của cuộn dây bằng cách thay đổi hệ số µ. Bằng việc là cho vào trong cuộn dây một cái lõi. Vì khi có lực tác dụng thì sẽ có sự chuyển động tương đối giữa cuộn dây và lõi, ứng với mỗi vị trí tương đối ấy sẽ có một giá trị điện cảm nhất định và giá trị này lớn nhất khi lõi nằm gòn trong cuộn dây. |  |
 |  |
Công thức đo:

Trong đó:
δ là độ biến dạng.
P là lực cần đo.
Tín hiệu ra Eo của chuyển đổi
Eo=S.δ.Ei
| Ta có công thức xác định lực P: | 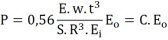 |
| Quan hệ giữa P và Eo là tuyến tính. Độ nhạy của chuyển đổi: |  |
| Ứng suất cực đại của vòng đàn hồi ở đỉnh và đáy vòng: |  |
| Tỉ số điện thế khi tải cực đại: | 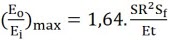 |
Suy ra
Ví dụ: một cảm biến lực điện cảm vòng, phạm vi dịch chuyển của lõi (độ nhạy 250mV/V). Nếu dụng cụ có độ biến dạng cực đại δmax=1,25 tại Pmax thì ta có:
(E0/Ei)max = S. δmax = 250.1,25 = 313mV/V.
Cảm biến lực kỹ thuật số
Biến lực thành tần số.
Chuyển đổi điện cảm, điện dung kết hợp với các mô đun phát tần số LC và RC.

Cảm biến lực điện dung:
 | ε0 = hằng số điện môi của không khí
εr =hằng số điện môi của dung môi
A = Diện tích
h = khoảng cách giữa hai tấm
|
Hình ảnh Cảm biến lực thực tế và ứng dụng:
Cảm biến lực dạng thanh:

Cảm biến lực dạng dầm:

Trạm cân xe tải:

Nguồn: Internet
Nếu có thắc mắc gì, hãy liên hệ với chúng tôi để có cách giải quyết nhanh nhất
0988 708 308